
This is the 4th post in our Executable and Linkable Format (ELF) 101 series, where the goal is to spread awareness about the format and the current Linux threat landscape.
In the final post of this series, we will explore the dynamic linking process, including its purpose, how it works and the different linking modes. Apart from being a complex process, dynamic linking can also be abused by malware authors and therefore it is important for malware analysts to understand how the process works.
This post follows part three of our ELF series, in which we discussed relocations and their relationship with symbols—useful for understanding dynamic linking.
Linking Overview
In order to understand dynamic linking, we must first define linking. Linking is the process of joining together multiple object files, to create a shared library or an executable.

Compilation of an object file
When one object file references functions or variables—which do not exist within the file’s context—but rather in other object files (dependencies), they must be linked. Linkers allow the use of separate, independent sources of code by providing a way to merge the code together into a single file, so the developer will be spared of this low-level detail.
For example:

main.c does not implement the printf function, so in order to invoke printf, main.o will have to be linked against printf.o (the include <stdio.h> directive only imports the definition of printf—it does not contain its implementation).
There are two linking types:
- Static linking: Completed at the end of the compilation process
- Dynamic linking: Completed at load time by the system
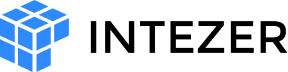
Static linking is fairly simple:
The compile-time linker (ld) collects all relevant object files—main.o and the libc.a static library (a bundle of object-files)—applies relocations and combines the files into a single binary. As such, when many object files are linked, the resulting binary file size can become very large.
Dynamic linking, on the other hand, is a more complex process. Unlike in static linking, ld requires shared libraries to create a dynamically linked executable. The output file will contain the executable’s code and the names of the shared libraries required, embedded within the binary:

When the binary is executed, the dynamic linker will find the required dependencies to load and link them together. Thereby, deferring the linking stage from compile-time to run-time. We will detail how this process works shortly.
There are pros and cons to these two approaches:
- Static linking allows containing all dependencies in a single binary, making it more portable and simple to execute, at the expense of the file size.
- Dynamic linking allows the binary to be smaller, at the expense of having to ensure that the required dependencies exist in the target system that the binary will be executed in.
The Dynamic Linking Process
The dynamic linking process begins immediately after execution.
For statically linked programs, execution is straight forward. The system creates the memory layout from the file’s segments and passes control to the file’s entry point.
With dynamically linked programs, the system executes the file’s “interpreter”, which is an intermediate program that should set up the environment and only then execute the main binary. The interpreter lies in the PT_INTERP segment created by the compile-time linker (ld). In this case, the interpreter is the dynamic linker program ld-linux.so.2:

The .interp section is mapped in the same address as the PT_INTERP segment
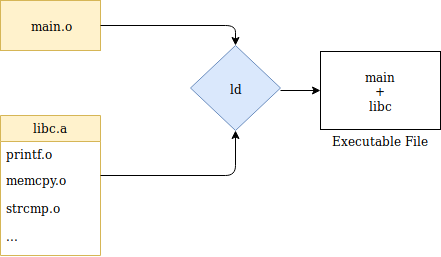
The dynamic linker will set up the environment using dynamic entries from the .dynamic section:
These entries are crucial to the dynamic linker, which include:
- DT_NEEDED - the name of a required dependency to load.
- DT_SYMTAB - the address of the dynamic symbol table (covered in our previous blog post about symbols).
- DT_FLAGS - such as the BIND_NOW flag that instructs the dynamic linker to perform all linking before handing over control to the program.
When the binary is executed, the system loads the dynamic linker into memory and execution will be passed to the dynamic linker’s entry point. The dynamic linker begins preparing the environment as follows:
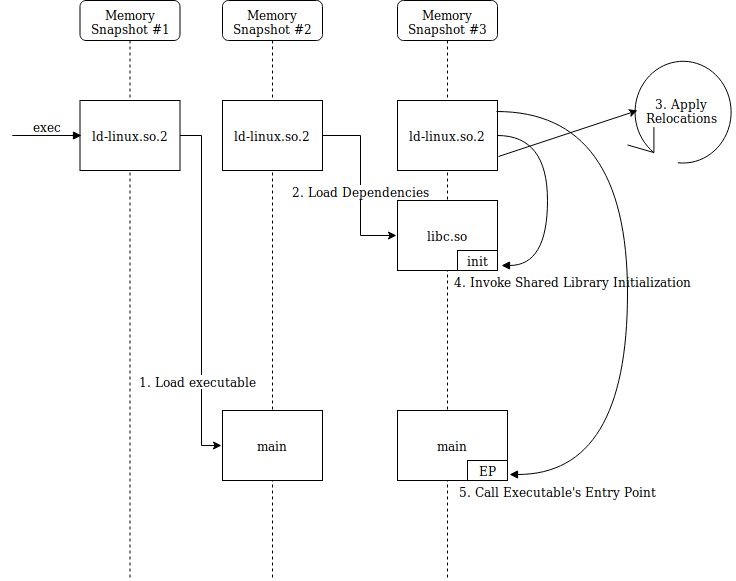
Memory view during dynamic linking
- Load the original file’s PT_LOAD segments in memory.
- Use the .dynamic section/segment to read dependencies, search for them on disk and load them in memory as well. This is done recursively for dependent libraries—they can be dynamically linked as well. The dependency searching algorithm is outlined in the ld.so man page.
- Perform relocations - shared libraries are loaded into non-deterministic addresses and must have absolute addresses patched, as well as resolving references to other object files.
- Invoke shared library initialization functions (registered in the .preinit_array, .init, .init_array sections).
- Finally, pass control back to the original binary’s entry point, making it seem to the binary that control was passed directly from exec.
It is important to mention the LD_PRELOAD feature, which enables defined libraries to precede the loading of other dependencies. This is useful for overriding functions in other linked modules. This feature can be configured via the LD_PRELOAD environment variable, or via the /etc/ld.so.preload file.
This feature is often abused by malware developers to hook known functions. Our recent HiddenWasp Linux-based malware discovery demonstrates such use:



Hooked libc functions by malicious preloaded libse1linux.so
Another interesting feature is LD_LIBRARY_PATH. This environment variable holds the path to the first directory where dependencies will be searched for, and is therefore abused by some malware developers as well.
Additional environment variables and configuration files that can alter the dynamic linker’s behavior do exist, and will be covered in the future dedicatedly.
Lazy Linking
We mentioned earlier that the dynamic linker performs all relocations before handing over control to the main binary, however, this is not always the case.
Let’s examine the following code example which will be dynamically compiled:
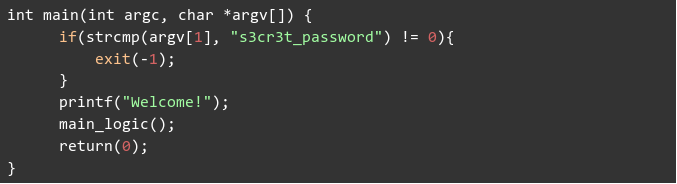
The program checks for the correct input in its command line “s3cr3t_password”.
If the input matches, the program will begin executing its main logic. If not, the program will immediately terminate.
If the program receives an incorrect input, it will terminate, rendering useless all of the relocation work performed by the dynamic linker. One can imagine how many relocations would be applied on a codebase with thousands of symbols. Precious time would be wasted by enforcing each and every symbol relocation.
Lazy linking is an optimization for this problem. Lazy linking instructs the dynamic linker to resolve function references when they are called (lazily) instead of at load-time (eagerly).
This is enabled by the Procedure Linkage Table (PLT) and the Global Offset Table (GOT).
The GOT holds entries of addresses of global variables and external functions.
The PLT consists of short entries of instructions (often called “trampolines” or “thunks”), used to reach external functions by redirecting control flow of execution to its corresponding GOT entry.
Generally speaking, in dynamically linked executables, external functions are reached by calling their respective PLT entry:

The PLT entry will retrieve the function’s address from the function’s GOT entry, and call it:

- With early binding, GOT entries are relocated by the dynamic linker at load-time.
- With lazy linking, the GOT entries will be relocated on-demand by a function call. At a function’s first invocation, the PLT will be used to call the dynamic linker to link the missing function.
We will compile the last example with lazy linking this time.

Now, we can see what happens when a function is called for the first time:
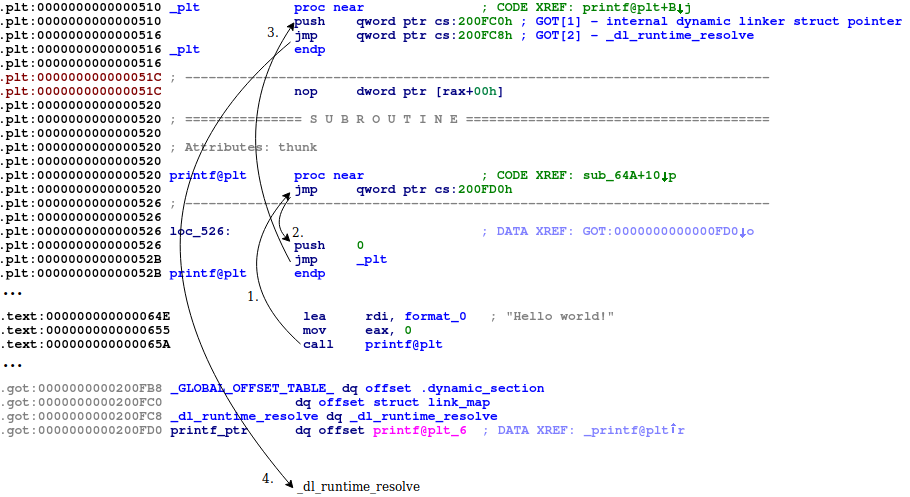
- The printf PLT entry is called, the GOT entry is retrieved and jumped to.
- At load-time, the dynamic linker fills every GOT entry with the address pointing to the second instruction of the respective PLT entry. Therefore, printf’s GOT entry will point back to printf@plt+0x6. The dynamic linker needs to know which function needs to be relocated, so we push a number to the stack (I.E. 0): An index, which serves as the index of the relocation in the .rel.plt section, is used to calculate the requested entry in the GOT (GOT[index+3]—the first three indexes are reserved to addresses related to the dynamic linker as seen in the illustration).
- The first PLT entry (PLT[0]) is called, whose purpose is to call the dynamic linker’s _dl_runtime_resolve to resolve the designated relocation.
- Consequently, control will be passed to the dynamic linker. The dynamic linker will relocate the printf GOT entry to point to the correct address within libc.so, and finally pass control to printf.
A resolved GOT entry:
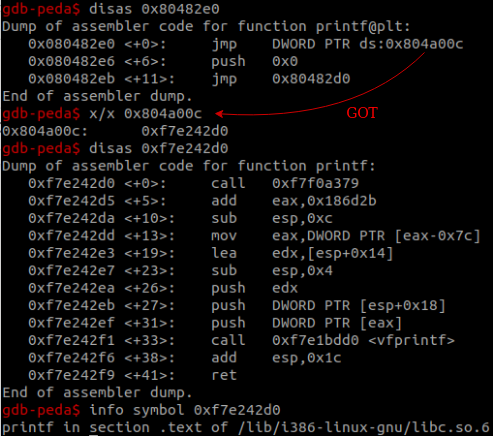
Future calls to printf@plt will retrieve printf’s resolved address residing in the GOT and jump there immediately.
Summary
This post explained the differences between static and dynamic linking. Furthermore, the information presented the dynamic linking process, and its lazy linking feature.
It is interesting to see malware in the wild abusing dynamic linker features as it does require some degree of knowledge and sophistication.
We hope you enjoyed reading this series! If you have any questions, please feel free to contact us.
Here are some additional resources for further reading:
Intezer
Count on Intezer AI SOC to triage, investigate and respond to every alert at unmatched speed and accuracy.
In this article
Share article
Executable and Linkable Format 101 Part 4: Dynamic Linking
.png)
AI SOC
AI
Company News
5 minutes
Loop engineering comes to the SOC: Introducing the Intezer Org Brain
Organizational context in an AI SOC is table stakes. Org Brain is very different. It learns, it recalls, it fetches what it's missing, and it gets sharper with every alert it touches, all autonomously.

Detection Engineering
AI SOC
8 minutes
Detection engineering in the AI era
AI is lowering the barrier to sophisticated attacks. Explore why detection engineering matters and where most programs fall short.

AI SOC
CISO
Company News
Introducing Custom Agents: Automate your SOC, your way
Add your own agents and automations on top of the ones Intezer runs out of the box, take more of the manual work off your analysts, and tailor AI SOC to the way your team actually operates.